Modele matematice ale sistemelor fizice
Turc Traian, Dulău Mircea
Departamentul de Inginerie electrică și Tehnologia informației
Prin conţinutul lor informaţional, calitativ şi cantitativ, modelele de natură matematică se dovedesc a fi descrieri foarte performante pentru studiile din domeniul ingineriei sistemelor.
Modelarea bazată pe principiile fizicii realizează legături între intrări şi ieşiri, prin intermediul unor relaţii analitice, care includ şi semnalele interne din structura sistemului. Aceste relaţii analitice sunt, de fapt, relaţii din diverse domenii ale fizicii, aplicate adecvat în contextul problemei de modelare.
Ingineria sistemelor automate operează cu câteva tipuri de descrieri matematice, acceptate drept standarde pentru activităţile de analiză şi proiectare, respectiv:
• modele matematice intrare-ieşire (ecuaţii diferenţiale, funcţii de transfer, caracteristici de frecvenţă);
• modele matematice intrare-stare-ieşire (ecuaţii de stare, ecuaţii de legătură).
Un sistem de ordinul II este caracterizat printr-o ecuaţie diferenţială de forma:
![]() ,
,
în care: ![]() este semnalul de ieșire;
este semnalul de ieșire; ![]() - semnalul de intrare/referință;
- semnalul de intrare/referință;
a2, a1, a0 – coeficienți cunoscuți.
Cu notaţiile parametrilor:
![]() - pulsaţia naturală a sistemului
neamortizat;
- pulsaţia naturală a sistemului
neamortizat;
![]() - factor de amortizare (zeta);
- factor de amortizare (zeta);
![]() - coeficient de amplificare,
- coeficient de amplificare,
se obține forma:
![]() .
.
În
practică, toţi coeficienții care intervin în calculul
parametrilor ![]() sunt pozitivi, ceea ce conduce la concluzia că
factorul de amortizare
sunt pozitivi, ceea ce conduce la concluzia că
factorul de amortizare ![]() .
.
Astfel, considerînd un semnal de intrare de tip treaptă:
- pentru ![]() , răspunsul sistemului defineşte un regim oscilant
neamortizat;
, răspunsul sistemului defineşte un regim oscilant
neamortizat;
- pentru ![]() , răspunsul sistemului defineşte un regim oscilant
amortizat;
, răspunsul sistemului defineşte un regim oscilant
amortizat;
- pentru ![]() , răspunsul sistemului defineşte un regim aperiodic
(critic) amortizat;
, răspunsul sistemului defineşte un regim aperiodic
(critic) amortizat;
- pentru ![]() , răspunsul sistemului defineşte un regim aperiodic
supraamortizat (de durată mai lungă decât în cazul
, răspunsul sistemului defineşte un regim aperiodic
supraamortizat (de durată mai lungă decât în cazul ![]() ).
).
Pentru exemplificare se consideră un sistem de reglare în buclă închisă (Fig. 1), în care:
-
funcția
de transfer pe calea directă are forma: ![]() ;
;
-
funcția
de transfer în buclă închisă, cu reacție negativă
unitară (în ipoteza amplificării K = 1), are forma: ![]() .
.

Fig. 1. Schema în buclă închisă
Pentru implementarea în aplicație, se consideră:
- forma numerică a sistemului, obținută prin aproximarea succesivă a derivatei cu diferența de ordinul unu, de forma:
-
![]() ,
,
în care Te este perioada de eșantionare;
- ca urmare, pentru sistemul de ordinul II rezultă:
![]() ),
),
în
care: ![]() .
.
Aplicația, cu interfața din Fig. 2, permite analiza comportării sistemului, în funcție de parametrii specifici:
- factorul de amortizare (zeta), x, care determină suprareglajul;
- pulsaţia naturală, wn, care determină viteza de răspuns.
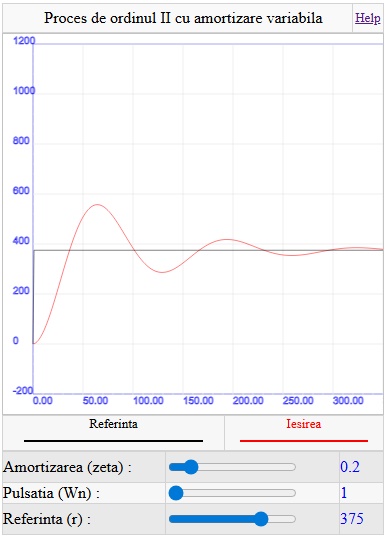
Fig. 2. Interfața cu utilizatorul
Aplicatia e realizata in JavaScript si utilizeaza urmatorul algoritm:
A=1+2*zeta*Wn*Te + (Wn*Te)*(Wn*Te);
yk=1/A*(((2+2*zeta*Wn*Te)*yk1)-yk2+(Wn*Te)*(Wn*Te)*r);
yk2 = yk1;
yk1 = yk;
unde:
- zeta este factorul de amortizare = 0...1,5
- Wn este pulsatia = 1...5
- yk este valoarea calculata pentru iesire din pasul curent k
- yk1 este valoarea lui y in pasul k-1
- yk2 este valoarea lui y in pasul k-2
- r este referinta = 0...500
- Te este timpul de esantionare 50 ms